Boresight Calibration
Boresight Calibration#
The boresight calibration procedure estimates the offset between nadir and the true camera pointing direction. Inaccuracies with the boresight offsets propgate through into the geocorrection of the data and the final data will be offset from the true position. There are 3 degrees of freedom in the boresight:
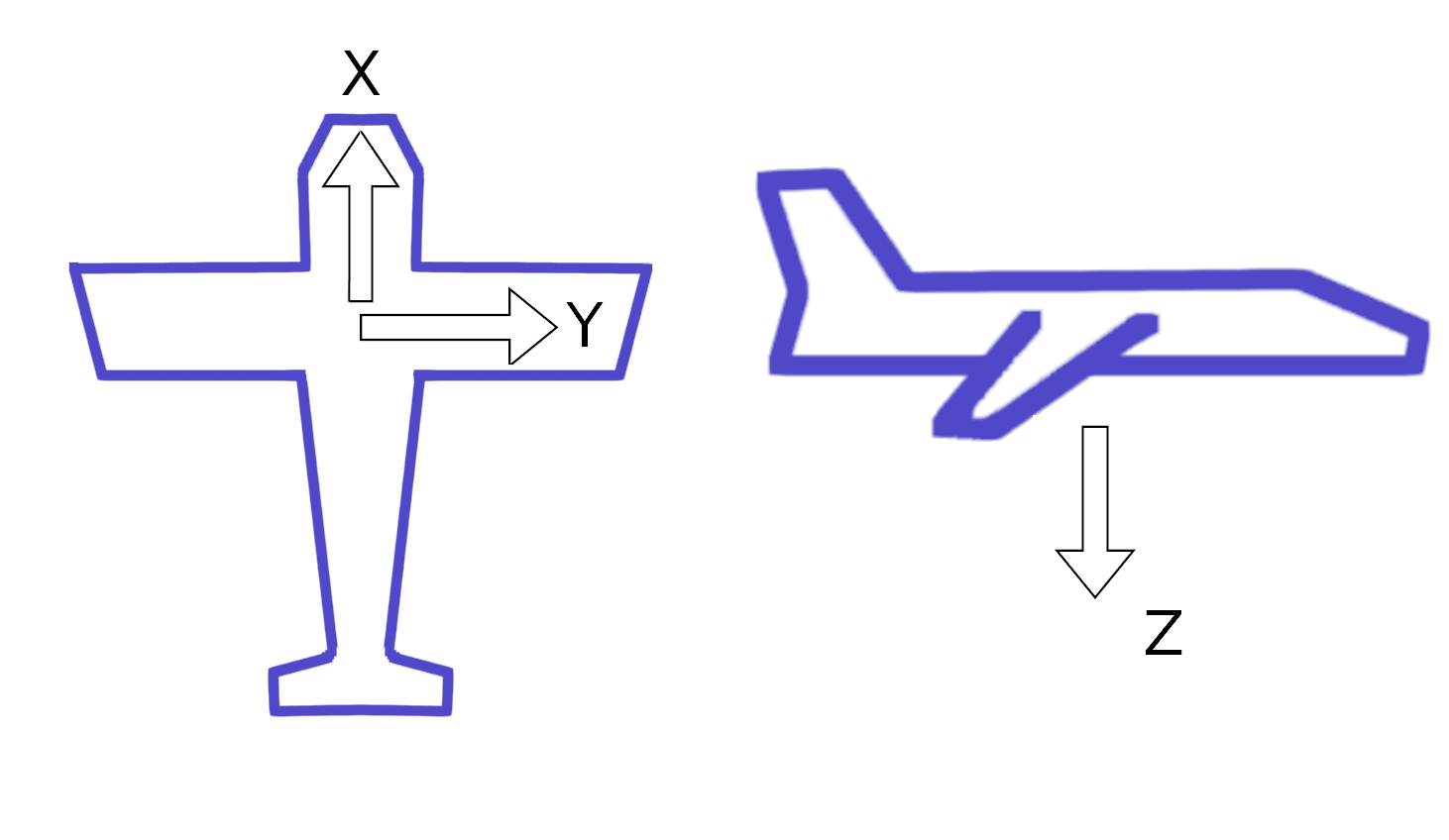
roll - a rotation around the x-axis (nose to tail of aircraft) and will display as a positional shift across track.
pitch - a rotation around the y axis (along the wings of an aircraft) and will display as a positional shift along track
yaw - a rotation around the z axis (perpendicular to aircraft plane) and will display as a positional shift along and across track.
The altitude of the sensor platform will affect the size of the positional offset on the ground along the basic principle of: the higher the platform the larger the error distance.
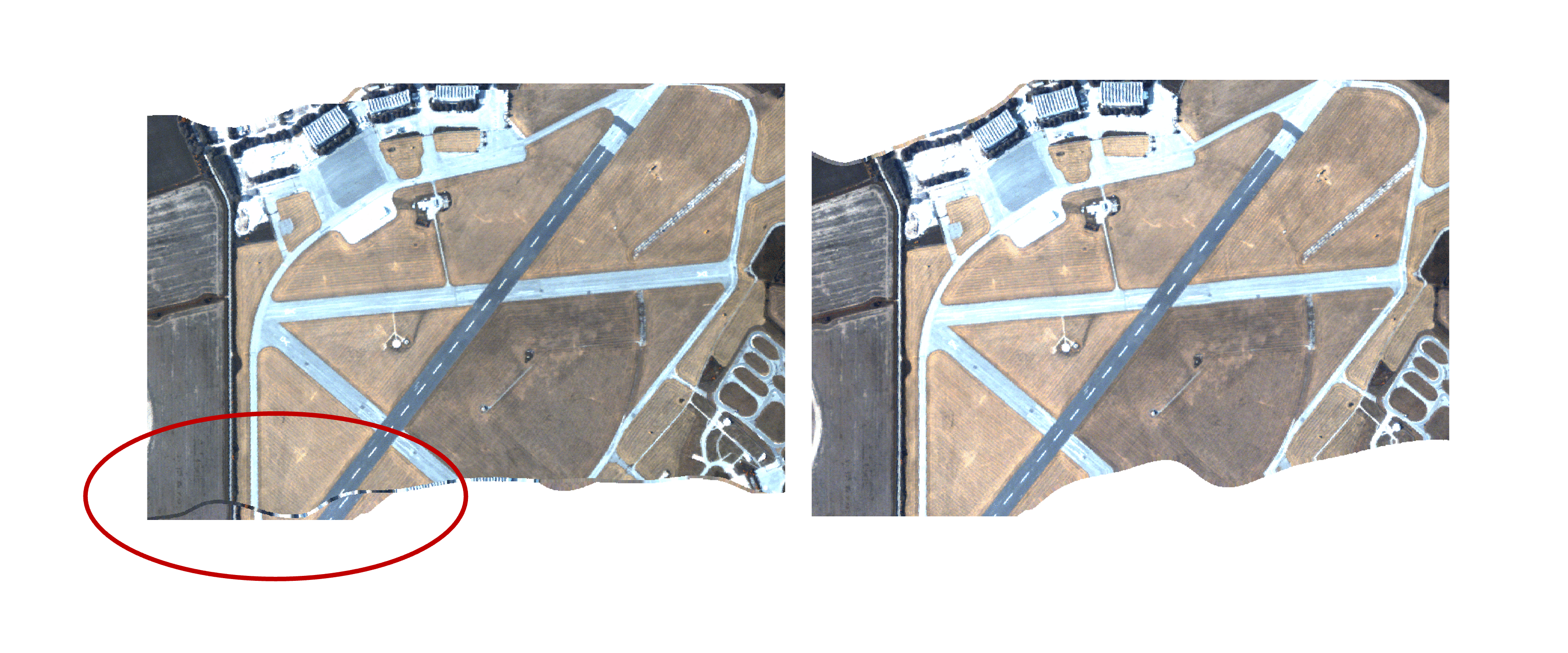
This example shows the effect of processing data without boresight correction values. The immediate effect in a single flight line is that geolocation errors are increased, but with multiple flight lines mosaicked obvious misalignments of flight lines becomes apparent.